
Cum funcționează Autoguiding?
Primii pași cu PHD Guiding
Push Here, Dummy: primii pași în utilizarea unui software de Autoguiding, pe exemplul programului PHD Guiding.
 Direct la țintă cu fotografii cu expunere lungă: telescop cu echipament de autoguiding în acțiune. Mario Weigand
Direct la țintă cu fotografii cu expunere lungă: telescop cu echipament de autoguiding în acțiune. Mario Weigand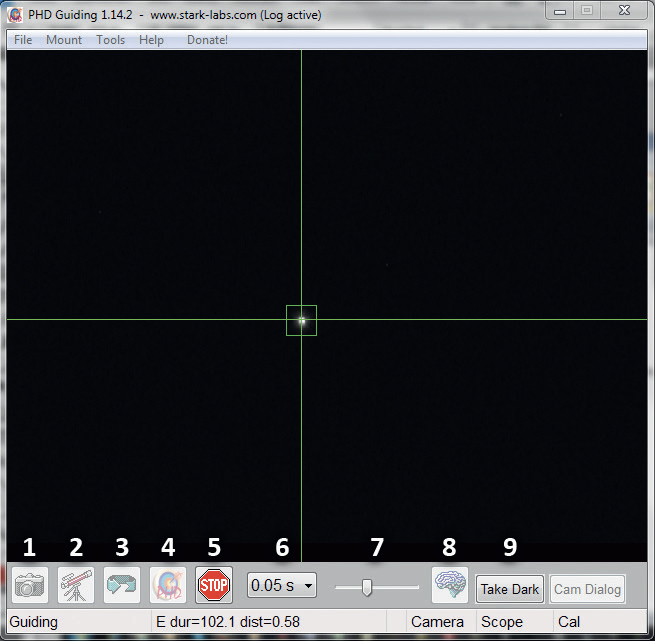 Fig. 2: Fereastra principală a PHD cu funcțiile importante. Mario Weigand
Fig. 2: Fereastra principală a PHD cu funcțiile importante. Mario WeigandÎn acest articol vom discuta despre primii pași în utilizarea unui software de autoguiding. Programul PHD Guiding (Push Here, Dummy) oferă o soluție gratuită în acest sens. Aparent, este și deosebit de ușor de utilizat. Acesta acceptă practic toate camerele de urmărire consacrate.
Programul este clar structurat, ceea ce facilitează asimilarea subiectului. După pornire, apare fereastra programului: Setările de bază pot fi accesate prin intermediul meniului standard. Mai jos apar imaginea curentă a camerei și bara de control cu cele mai importante funcții. Fereastra programului mai are, în partea inferioară, o bară de stare în care se afișează mesajele importante.
Setări implicite
La prima utilizare trebuie setate conexiunile necesare la autoguider și la montură. În acest sens, este important dacă computerul sau autoguiderul comunică direct cu montura prin intermediul conexiunii ST-4. În acest din urmă caz, în meniul „Mount“ trebuie selectată opțiunea „OnCamera“. Dacă folosiți o montură fără interfață ST-4, ci doar cu o interfață serială (RS-232), controlul se va face prin intermediul driverului ASCOM.
1. Stabilirea conexiunii
Conexiunile la camera de urmărire sau la montură se stabilesc în această ordine prin intermediul tastelor 1 și 2. În cazul unei conexiuni ASCOM se va deschide fereastra de dialog aferentă.
2. Pregătirea autoguiderului
După stabilirea conexiunii, primul pas pentru pregătirea sistemului este focalizarea autoguiderului. În acest scop, poate fi utilă creșterea timpului de expunere la cinci secunde, astfel încât să devină vizibile chiar și stelele puternic defocalizate. Apoi vă apropiați treptat de poziția de focalizare în modul loop (tasta 3). Marcarea poziției de focalizare pe focalizator poate accelera acest proces în următoarele ocazii.
Timpii de expunere de aproximativ o secundă sunt utili pentru modul de urmărire. O stea de ghidaj adecvată nu trebuie să fie prea slabă, dar nici supraexpusă. Selecția se face manual, prin simpla apăsare a stelei dorite. În bara de stare se afișează apoi o valoare S/N, care vă ajută să evaluați steaua de ghidaj. Aceasta indică cât de bine se distinge steaua de zgomotul de fond. Se recomandă valori de 4,0 sau mai mari. În cazul în care nu este disponibilă o stea de ghidaj adecvată, câmpul vizual poate fi reglat cu ajutorul clemelor tubului de ghidare, al unui excentric sau al unui off-axis-guider.
Odată găsită setarea corectă, trebuie realizată o imagine dark frame cu capacul de pe optica de urmărire (butonul 9) pentru a corecta hotpixel-ii. Imaginea darkframe este apoi extrasă automat din fiecare imagine ulterioară. Atunci când se modifică timpul de expunere, trebuie creată o nouă imagine dark. Dacă ceva nu a mers bine în timpul fotografierii, imaginea dark defectă poate fi ștearsă accesând meniul „Tools/Erase Dark“.
3. Calibrarea
Înainte de a începe corecția de urmărire, mai trebuie calibrat autoguider-ul. Asta înseamnă că PHD Guiding trebuie să învețe cum și cât de puternic reacționează montura la comenzi. Dacă modul loop este încă activ, acesta va fi dezactivat. Apoi se face clic pe tasta 4 pentru ca PHD Guiding să înceapă calibrarea. Semnalele de comandă sunt date succesiv pe ambele axe și se poate observa cum steaua de ghidaj se mișcă încet.
Calibrarea poate fi optimizată pentru distanța focală de urmărire utilizată din setări (tasta 8), prin intermediul parametrului „Calibration step“. La 500 mm, de exemplu, 1000 ms este o valoare rezonabilă. La distanțe focale lungi, în jurul valorii de 2000 mm, se recomandă pași de calibrare mai mici, de 250 ms.
Dacă calibrarea a fost efectuată cu succes, programul trece imediat la urmărire. În bara de stare apare mesajul „Guiding“, iar marcajul stelelor este verde.
4. Procesul de autoguiding și reglajele fine
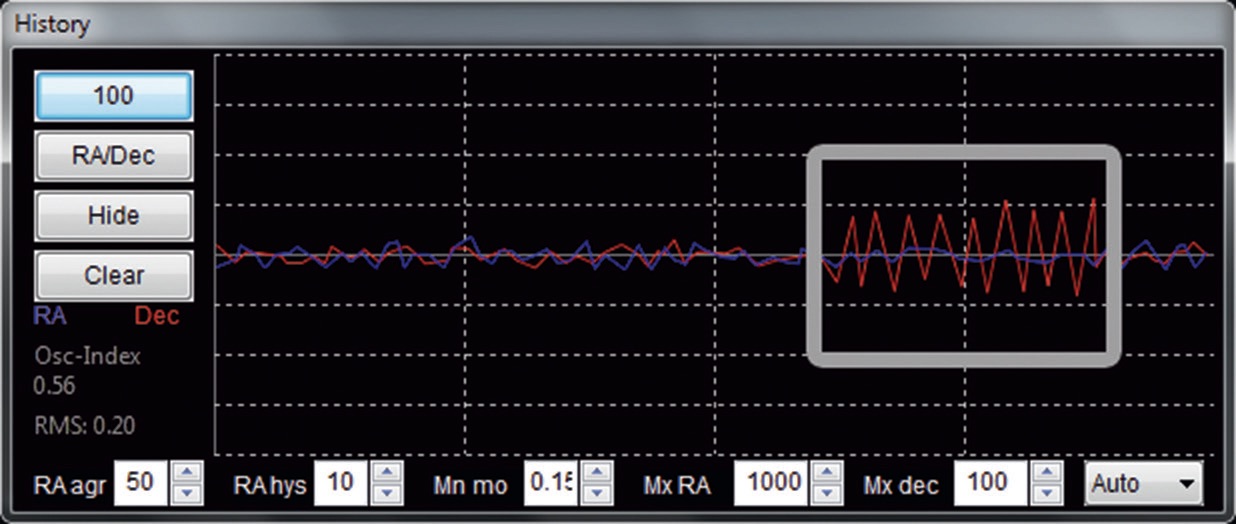 Fig. 3: Diagrama de erori cu urmărire lină. Secțiunea din dreapta prezintă o vibrație la declinație ca urmare a agresivității prea mari setate. Mario Weigand
Fig. 3: Diagrama de erori cu urmărire lină. Secțiunea din dreapta prezintă o vibrație la declinație ca urmare a agresivității prea mari setate. Mario WeigandFuncționarea urmăririi poate fi verificată cu ajutorul graficelor de erori, care pot fi accesate prin intermediul meniului „Tools/Enable Graph“. Graficul albastru și cel roșu prezintă deviațiile în ascensie și declinație.
Probleme posibile:
Este posibil ca programul să piardă la un moment dat stelele de ghidaj slabe. Acest lucru poate fi recunoscut prin marcajul cu stea galbenă. Numai o stea de ghidaj mai luminoasă, un timp de expunere mai lung sau parametrul „Noise reduction“ (a se vedea mai jos) pot ajuta în acest caz.
În cazul în care corecția urmăririi nu funcționează corect, steaua se va îndepărta în timp de poziția dorită. PHD Guiding recunoaște acest lucru oferind un mesaj de avertizare roșu.
O cauză frecventă este o conexiune defectuoasă a cablului cu montura sau un joc excesiv al angrenajului.
Există, de asemenea, câțiva parametri importanți, accesibili prin intermediul tastei 8, care influențează calitatea corecției de urmărire. Trebuie spus că nu există parametri universal corecți. Setările optime trebuie să fie găsite individual pentru fiecare telescop. Următoarele sfaturi vă pot fi de ajutor:
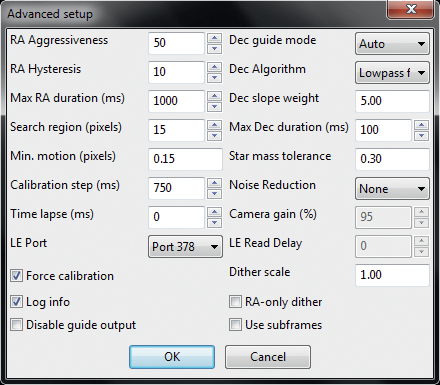 Fig. 4: Fereastra pentru setările avansate. Mario Weigand
Fig. 4: Fereastra pentru setările avansate. Mario WeigandRA Aggressiveness:
Agresivitatea este o măsură a intensității cu care programul trebuie să reacționeze la o eroare de urmărire. Diagrama de erori este studiată în vederea optimizării. Dacă agresivitatea este setată la un nivel prea redus, guider-ul are nevoie de prea mult timp pentru a recentra steaua de ghidaj după o eroare de urmărire. Valoarea trebuie crescută în trepte de zece. Pe de altă parte, dacă valoarea este setată la un nivel prea crescut, are loc o supracorecţie - steaua „oscilează“ în jurul poziției-țintă (a se vedea Fig. 3). Cu toate acestea, aici trebuie ținut cont de interacțiunea cu histerezisul descris mai jos!
RA Hysteresis:
Histerezisul este un prag de reacție. Aici se poate modifica cea mai mică valoare a erorii de la care trebuie efectuată corecția. Dacă pragul este prea mic, sistemul de ghidare reacționează la fluctuațiile provocate de seeing, ceea ce poate duce la supracorecţie, la fel ca în cazul agresivității. Această valoare se optimizează tot în pași de zece.
Noise reduction:
În cazul stelelor de ghidaj slabe, poate fi de ajutor binning-ul pixelilor. Pixelii 2×2 sau 3×3 pot fi sintetizați pentru a îmbunătăți valoarea S/N. Totodată se reduce însă și rezoluția. Cu toate acestea, în cazul unui telescop pentru ghidaj cu o distanță focală foarte scurtă, calitatea corecției urmăririi poate scădea ca urmare a binning-ului pixelilor. Important: Dacă această setare este modificată, este necesară o nouă imagine întunecată! În general, setările implicite nu sunt modificate pentru ceilalți parametri. Nimic nu mai stă acum în calea unei astrofotografii cu expunere lungă și urmărite corect!
Autor: Mario Weigand / Licență: Oculum-Verlag GmbH